Zespół badawczy pod kierownictwem prof. Tadeusza Szelangiewicza z Katedry Oceanotechniki i Budowy Okrętów szczecińskiej Akademii Morskiej przeprowadził na Jeziorze Głębokie próby działania całego systemu komputerowego i wyposażenia pomiarowo-nawigacyjnego zainstalowanego w modelu statku autonomicznego. Testowany był sprzęt oraz łączność ze stacją lądową.
Przeprowadzono próby i zarejestrowano obrazy z kamer oraz lidarów, sprawdzono parametry z anten GNSS i kompasu w czasie rzeczywistym.
– Wszystkie systemy i urządzenia działają bardzo dobrze, a w oparciu o nowe doświadczenia będziemy wprowadzać modyfikacje i jeszcze lepsze rozwiązania prof. Tadeusz Szelangiewicz. – Chodzi głównie o szerokopasmową transmisję danych np. obrazu na duże odległości. Dalsze prace to doskonalenie programu do autonomicznego sterowania i kolejne próby – dodaje.
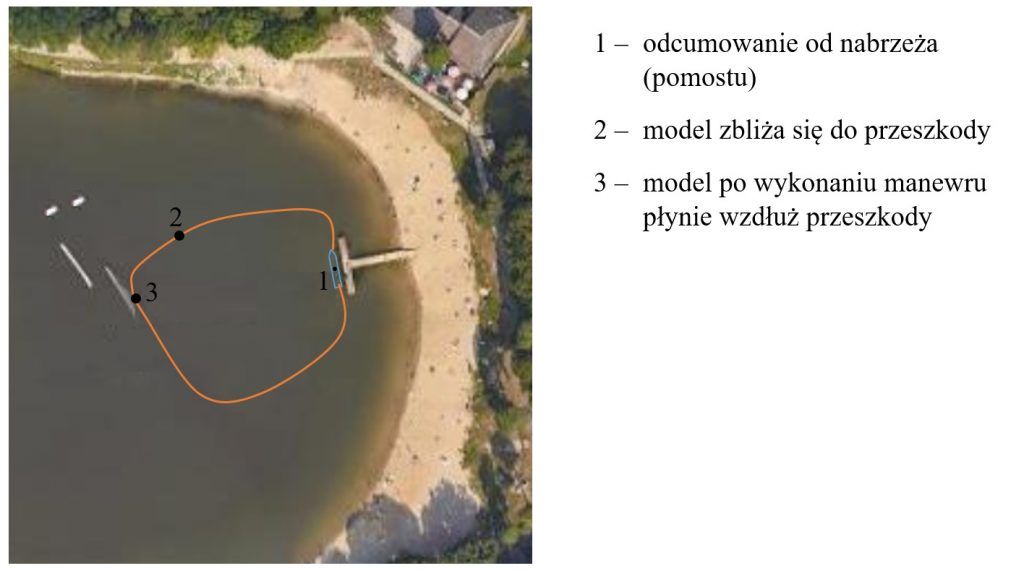
Najnowsze testy modelu bezzałogowego statku transportowego potwierdziły, że zastosowany układ napędowy (dwa rufowe pędniki azymutalne i dwa dziobowe stery strumieniowe) ma doskonałe właściwości manewrowe, które będą niezbędne na rzeczywistym autonomicznym statku.
Na akwenie otwartym potwierdzono, że zainstalowany system z kompletnym wyposażeniem w czujniki pomiarowe i urządzenia nawigacyjne pozwala na realizowanie wszystkich funkcji podczas autonomicznego sterowania.
Na rzeczywistym statku będą zainstalowane okrętowe urządzenia pomiarowe i nawigacyjne w wykonaniu morskim. Zastosowane w modelu statku urządzenia charakteryzują się identycznymi funkcjonalnościami jak te stosowane w żegludze.
Przeprowadzone testy dotyczyły głównie sprzętu zainstalowanego w modelu statku, interpretacji mierzonych parametrów oraz transmisji ich i rejestracji w stacji lądowej (GSC). Nie badano szczegółowo samego oprogramowania do autonomicznego sterowania modelem – takie testy będą prowadzone w następnym etapie badań eksperymentalnych.
Testy odbyły się na akwenie otwartym przy spokojnej pogodzie, czyli bez falowania i silnego wiatru.
– Takie badania mają wymiar nie tylko naukowy i rozwojowy w kontekście opracowywania nowej, autorskiej technologii, dla nas to też przygoda – deklaruje prof. Szelangiewicz.
Prototypowy model autonomicznego statku powstał w Katedrze Oceanotechniki i Budowy Okrętów. Model statku ma 3,15 m długości, 0,46 m szerokości, 0,17 m zanurzenia.
Opracowywany komputerowy system sterowania autonomicznego, w trakcie realizowanego przez model statku zadania (np. rejs po zadanej trasie i wykonywanie manewru antykolizyjnego) musi otrzymywać niezbędne informacje dotyczące nie tylko parametrów ruchu statku (pozycja, prędkość, kurs), ale także informacje lub ostrzeżenia o pojawiającej się przeszkodzie stałej lub ruchomej (inny, pływający statek).
Model statku bezzałogowego został wyposażony w urządzenia pomiarowe i nawigacyjne, podłączone do kart I/O systemu komputerowego: lidary pracujące w zakresie 360˚ (dziobowy i rufowy), odbiorniki GNSS (dziobowy i rufowy), kompas elektroniczny, kamery HD (dziobowa i rufowa).