
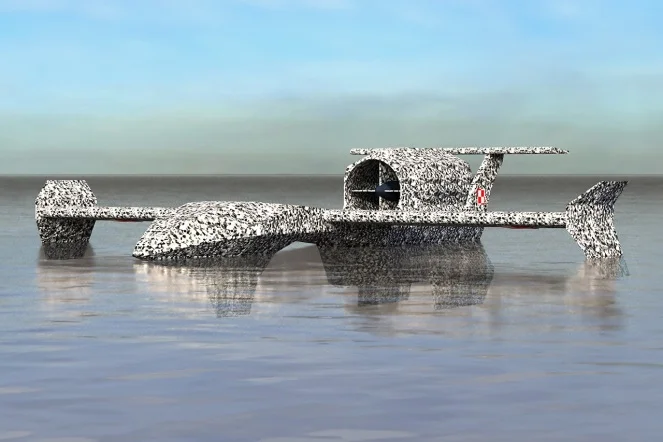
Ekranoplan to typ samolotu bezzałogowego, który leci nisko nad wodą, wykorzystując efekt przypowierzchniowy. Samolot, który powstaje na Politechnice Gdańskiej, będzie pierwszą tej wielkości i tego typu jednostką na świecie, a jego głównym celem jest wspieranie działań morskich oddziałów wojska.
Projekt powstaje w ramach konsorcjum Politechniki Gdańskiej, która jest jego liderem, Wojskowej Akademii Technicznej im. Jarosława Dąbrowskiego i Instytutu Technicznego Wojsk Lotniczych. Na jego realizację pozyskano kwotę kilkunastu milionów złotych. Projekt realizowany jest w ramach programu na obronność finansowanego przez Narodowe Centrum Badań i Rozwoju.
Ekranoplan jak skrzydła pelikana
Bezzałogowa platforma nawodno-powietrzna typu USV-UAV-WIG (ang. Unmanned Surface Vehicle – Unmanned Arial Vehicle – Wing in Ground Effect) to rodzaj pojazdu, który łączy cechy samolotu oraz pojazdu nawodnego. Porusza się on wykorzystując efekt przypowierzchniowy. Zjawisko to, w dużym skrócie, polega na zwiększeniu siły nośnej samolotu poruszającego się na niewielkiej wysokości nad ziemią bądź wodą (przyjmuje się wysokość równą połowie rozpiętości skrzydła). Skrzydła wytwarzają wtedy większą siłę nośną niż podczas lotu na większej wysokości. Wynika to przede wszystkim ze znacznego zwiększenia powierzchni wirowej generowanej przez płat. „Aerodynamicy” i „hydrodynamicy” z łatwością potrafią to zjawisko opisać analitycznie. Efekt powierzchniowy jest wykorzystywany na przykład przez ptaki takie jak czaple, żurawie czy pelikany, które w poszukiwaniu pokarmu lecą tuż nad powierzchnią wody, rzadko i „leniwie” poruszając skrzydłami.
Efekt przypowierzchniowy odkryto już w czasie I wojny światowej, ale dopiero w latach 20. XX wieku zaczęto go badać. W latach 30. w Finlandii i Szwecji przeprowadzono pierwsze próby z pojazdami wykorzystującymi to zjawisko, Na początku lat 60. w ZSRR zbudowano kilka eksperymentalnych ekranoplanów, które wykorzystywano do prób i badań nad efektem przypowierzchniowym. Pierwszy lot załogowego ekranoplanu odbył się w 1966 r.
Zwiększenie skuteczności sił szybkiego reagowania
Szybko zmieniająca się sytuacja geopolityczna na świecie oraz w rejonie Morza Bałtyckiego wymaga zmian systemów bezpieczeństwa na poziomie strategicznym i taktycznym. Z uwagi na nieprzewidywalność zdarzeń o charakterze nagłym, a szczególnie zdarzeń prowadzących do wystąpienia zagrożeń (umożliwiających jakościową i ilościową ocenę ryzyka i bezpieczeństwa) niezbędny jest stały rozwój zdolności sił szybkiego reagowania na akwenach morskich. Nowoczesna taktyka obrony na morzu wymaga posiadania wielofunkcyjnych okrętów i platform morskich, w tym nawodnych i podwodnych jednostek załogowych i platform bezzałogowych. Platformy bezzałogowe są elementami systemów sił szybkiego reagowania na morzu. Jedną z takich platform jest właśnie tworzony ekranoplan.
– Głównym celem projektu jest stworzenie rozwiązania, platformy, która przyczyni się do zwiększenia bezpieczeństwa państwa – tłumaczy kierownik projektu, prof. Mirosław K. Gerigk z Zakładu Pojazdów Mechanicznych i Technik Militarnych na Wydziale Inżynierii Mechanicznej i Okrętownictwa.
– Przy budowie prototypu postawiliśmy sobie kilka głównych założeń – dodaje dr inż. Marek Chodnicki z Zakładu Mechaniki Stosowanej i Biomechaniki WIMiO, kierownik zarządzający w projekcie. – Przede wszystkim jednostka ma realizować wyznaczone zadania nad obszarami wodnymi w pobliżu linii brzegowej, startować z wody, wykonywać loty na minimalnej wysokości nad powierzchnią wody i wodować, przenosząc ładunki o zadanej masie.
Turbośmigłowy napęd i zdalne sterowanie
W ramach projektu zostaną przeprowadzone badania z użyciem zaawansowanych metod symulacji komputerowej oraz badania na modelach fizycznych obiektu. Na podstawie otrzymanych wyników powstanie demonstrator technologii platformy, który można będzie testować w warunkach zbliżonych do rzeczywistych. Prototyp ekranoplanu ma być gotowy już w 2026 roku, a tworzony jest z materiałów hybrydowych: przede wszystkim włókien szklanych i węglowych z materiałem przekładkowym z tworzywa sztucznego.
Budowana platforma będzie miała napęd turbośmigłowy. Ma się unosić nad wodą na wysokości kilku metrów i ważyć maksymalnie 400 kilogramów. Pojazd będzie sterowany zdalnie z brzegu, kolejne etapy prac mają prowadzić do zwiększania jego autonomiczności.
Będą tworzone dwa fizyczne prototypy platformy. Budowa mniejszego rozpocznie się wiosną tego roku, a jego umowna wielkość wyniesie dwa metry. Docelowy prototyp będzie dwa razy większy i gotowość do testów osiągnie w 2026 roku.
Źródło, fot. Politechnika Gdańska